Media Summary: RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable Conflict-Based Search (CBS) and Heuristics for
Multi Agent Path Finding Ece6504 - Detailed Analysis & Overview
RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable Conflict-Based Search (CBS) and Heuristics for Short presentation of the paper: J. Kottinger, S. Shaull Almagor, and M. Lahijanian, “Explainable This talk aims to invite you to the forefront of MAPF research directly This is a re-recording of my invited talk at EurMAPF-25, ... The video that describes my research about the Real Time
This is a poster teaser talk for the paper "A Hierarchical Approach to We present background and detailed overview of the Windowed Anytime We propose a novel hybrid algorithm, LNS-SAT, that uses a Boolean Satisfiability (SAT) repair engine within a Large ... Final Project Presentation RBE550: Motion Planning Talk by Oren Salzman in TAU CG seminar 24-Nov-2021. J. Kottinger, S. Almagor, and M. Lahijanian, “Conflict-Based Search for Explainable
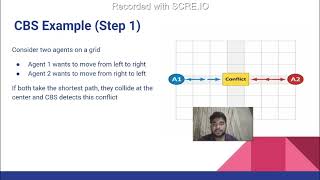
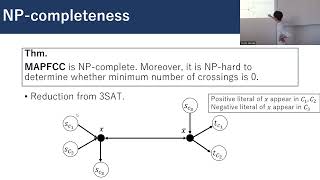
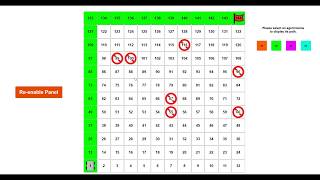
This video shows the fundamental features of Conflict-Based Search (CBS) and Heuristics for Multi-Agent Path Finding (MAPF)