Media Summary: ... previous tutorial I showed you how to run a Hello friends so today we'll be discussing about In this video, I introduce two important concepts in robot path planning:
3d Visibility Graph Based Motion - Detailed Analysis & Overview
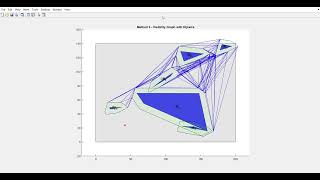
... previous tutorial I showed you how to run a Hello friends so today we'll be discussing about In this video, I introduce two important concepts in robot path planning: Robot Path Planning - Visibility Graph with Dijkstra Presentation of the contribution "Complex Network Time Series Analysis of Current Time Series in Nano-transistors with This is the third part of a 3 part series on geometric algorithms for robot
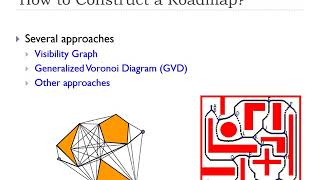
Our paper proposes a method of building a sparse topological map over large Okay so uh we are in computational geometry and I want to talk about the No so any search is basically getting into nested and nested levels of rectangles and Book : Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G., Burgard, W., Kavraki, L., & Thrun, S. (2005). Principles of Robot First Principles of Computer Vision is a lecture series presented by Shree Nayar who is faculty in the Computer Science ... spacesyntax Let's Learn together, Subscribe here: for our youtube channel ...
See the other videos in this series: This video ...













![Dungeon Architect: Visibility Graph [Unity]](https://i.ytimg.com/vi/redVnIWF7qk/mqdefault.jpg)




