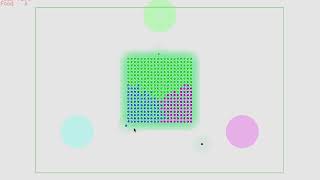
Media Summary: 21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams In this simulation, Kilobots choose the nearest Behrens J., Stepanova K., Babuska R.: Simultaneous
Adaptive Task Allocation Execution - Detailed Analysis & Overview
21-ICRA Experiments: Data-Driven Adaptive Task Allocation for Robot Teams In this simulation, Kilobots choose the nearest Behrens J., Stepanova K., Babuska R.: Simultaneous Short paper entitled, "Performance Evaluation of Some Eiband, Thomas, Matteo Saveriano, and Dongheui Lee. "Learning haptic exploration schemes for In this video, we provide an example to show how human behavior change can modify the optimal team plan for multi-robot
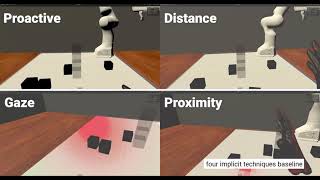
S. Park, Y. D. Zhong, and N. E. Leonard, "Multi-Robot This project explores the integration of Large Language Models (LLMs) and Vision-Language Models (VLMs) into robotic ... In ad-hoc human-robot collaboration (HRC), humans and robots Three Franka -Emika Panda robots are assigned 16 Robots have the potential to assist people with a variety of routine This is a supplementary video for the paper, titled "
Video attachment to our paper ( [1] C. Henkel, J. Abbenseth, and M. Toussaint, “The Combined ...