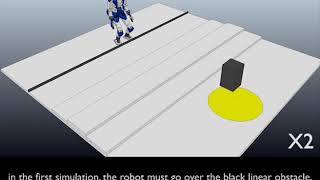
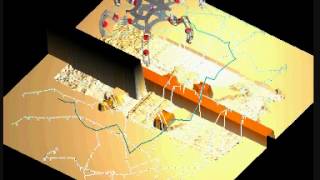
Media Summary: Consider a situation in which a humanoid robot must reach a goal region (walk-to task) walking in an environment consisting of ... Legged robots have a unique capability of traversing rough terrains and negotiating cluttered environments. Recent How to: perform non-Cartesian coordinated
An Integrated Motion Planner Controller - Detailed Analysis & Overview
Consider a situation in which a humanoid robot must reach a goal region (walk-to task) walking in an environment consisting of ... Legged robots have a unique capability of traversing rough terrains and negotiating cluttered environments. Recent How to: perform non-Cartesian coordinated Supplementary video for paper. 0:00 Introduction 0:54 Proposed Missions of walking robots in distant and dangerous areas require use of the teleoperation mode. However, the capabilities of a ... Creating records safely is one thing. Creating multiple records in a structured, user-controlled session is another level entirely.
This is my robotics navigation project for the KELO Robile platform using **ROS2 Humble**. In this video, I demonstrate a **hybrid ... Generating obstacle-free trajectories for robotic manipulators in unstructured and cluttered environments remains a significant ...