Media Summary: Autonomous planetary navigation requires terrain-aware perception tightly integrated with planning. This work presents a unified ... Junwei Liang, Lu Jiang, and Alexander Hauptmann. "SimAug: Learning Robust Representations from This is the video accompanying an ECCV2020 demo. The demo showcases the
Ar Trajectory Prediction 2 Simulating - Detailed Analysis & Overview
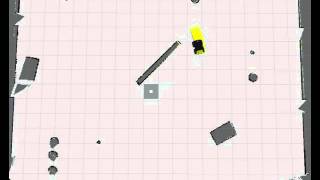
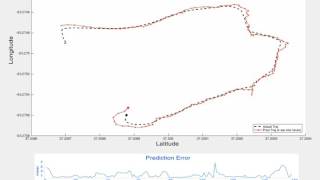
Autonomous planetary navigation requires terrain-aware perception tightly integrated with planning. This work presents a unified ... Junwei Liang, Lu Jiang, and Alexander Hauptmann. "SimAug: Learning Robust Representations from This is the video accompanying an ECCV2020 demo. The demo showcases the Presentation for ECCV'20. Liang, Junwei, Lu Jiang, and Alexander Hauptmann. "SimAug: Learning Robust Representations from ... In many games, especially in 2d puzzles, the player can see a line that represents the bullet This research focuses on developing a solution for the challenge of creating models that can predict the pedestrian's future ...
I build this prototype for a university course in Unity with ARFoundation/ARCore. You can spawn several planets, visualize their ... YOLOX-tiny inference on video recorded by yours truly at Baltimore ... In order to smoothly perform interactions between a humanoid robot and a human, knowledge about the human locomotion can ... Using TensorFlow, OpenCV and Python to implement an Early Collision Avoidance System. Predict the future paths of objects in N-body gravitational Using hidden Markov model (HMM) to predict a construction worker's movement path on the jobsite with high accuracy given past ...
Status: IEEE ACCESS, 2024, accepted. * Title: Dynamic Obstacle Avoidance for an MAV Using Optimization-based