Media Summary: Visual-Inertial localization code can be found at: Visit for more videos! Project Page: arXiv: ... Near Earth Autonomy develops technology for
Autonomous Aerial Navigation Using Monocular - Detailed Analysis & Overview
Visual-Inertial localization code can be found at: Visit for more videos! Project Page: arXiv: ... Near Earth Autonomy develops technology for There have been increasing interests in the robotics community in building smaller and more agile Project Page: arXiv: Abstract: We demonstrate real-time ... A monocular based navigation approach for UAV safe and autonomous
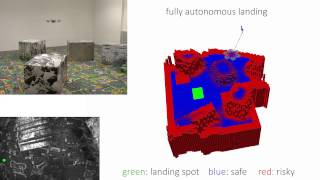
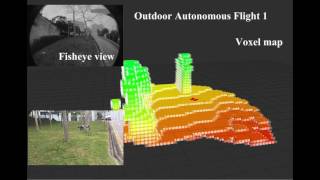
Deep Learning based Drone Tracking by an Autonomous UAV using a Monocular Camera In this paper, we propose a resource-efficient system for real-time 3D terrain reconstruction and landingspot detection for micro ... We present the first static-obstacle avoidance method for quadrotors This video is part of the supplementary material of the paper "A Map-free Deep Learning-based Framework for Gate-to-Gate ... Find out more information about this project and links to download the report at,









![[Tello] Monocular vision based autonomous navigation using ORB_SLAM2, Packnet-sfm and Fast-Planner 2](https://i.ytimg.com/vi/ciuxBRWLidI/mqdefault.jpg)