Media Summary: Lecture 1.3. Wherein we introduce and explore the operation of the Book : Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G., Burgard, W., Kavraki, L., & Thrun, S. (2005). Principles of Robot Motion: ... The explanation of a simple path planning
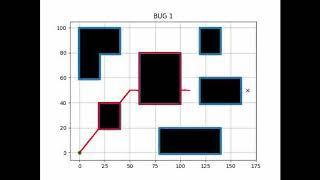
Bug 1 Algorithm 1 - Detailed Analysis & Overview
Lecture 1.3. Wherein we introduce and explore the operation of the Book : Choset, H., Lynch, K. M., Hutchinson, S., Kantor, G., Burgard, W., Kavraki, L., & Thrun, S. (2005). Principles of Robot Motion: ... The explanation of a simple path planning ECE 452 Assignment 3 at The University of Illinois at Chicago. Group members: Samuel Baki, Mehmet Yazar, Santiago Uribe. Lecture 1.5. Wherein we prove the completeness of the “Bug 1” algorithm Gaezbo + ROS Two wheeled mobile robot
This video presentation is prepared in context of ECE504 AUTONOMOUS MOBILE ROBOTS class of Abdullah Gul University You ... Bug1 Algorithm working in different environments This demo is from homework from EE596 Robot motion planning Course at Ankara Yildirim Beyazit University.The point robot ...