Media Summary: Lecture 1.2. Wherein we introduce and explore the operation of the The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different This demo is from homework from EE596 Robot
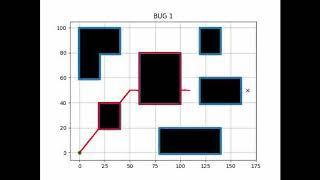
Motion Planning Algorithm Bug 0 - Detailed Analysis & Overview
Lecture 1.2. Wherein we introduce and explore the operation of the The shown robot (SparkFun Redbot) is shown to avoid obstacles and reach the goal using the different This demo is from homework from EE596 Robot How does a 6-DOF robot arm find a collision-free path through a cluttered workspace — and then execute it at maximum speed? This video presentation is prepared in context of ECE504 AUTONOMOUS MOBILE ROBOTS class of Abdullah Gul University You ... ECE 452 Assignment 3 at The University of Illinois at Chicago. Group members: Samuel Baki, Mehmet Yazar, Santiago Uribe.
Reactive navitation using a slightly modified In this video, the 9th of the series Exploring ROS with a 2 Wheeled Robot, we are gonna see the


















![[ROS Projects] - Bug 0 Foil vs. Bug 1 - Exploring ROS With a 2 wheeled Robot - Part 9](https://i.ytimg.com/vi/C1mzAGNZ0K4/mqdefault.jpg)
