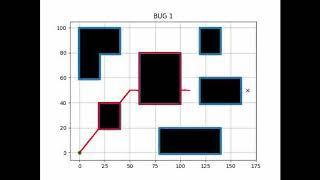
Media Summary: Call the line from the starting point to the goal the m-line 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it ... In this video, the 9th of the series Exploring Wherein we introduce and explore the operation of the
Bug2 Algorithm In Ros - Detailed Analysis & Overview
Call the line from the starting point to the goal the m-line 1) head toward goal on the m-line 2) if an obstacle is in the way, follow it ... In this video, the 9th of the series Exploring Wherein we introduce and explore the operation of the A 2 wheeled robot is equipped with a 2D laser range finder in order to detect obstacles in its environment. It needs to get to its ... The video represents the implementation of the
![[ROS Projects] Bug 2 - Exploring ROS with a 2 wheeled robot #Part 12](https://i.ytimg.com/vi/GYEt8hucRYI/mqdefault.jpg)



![[ROS Projects] - Bug 0 Foil vs. Bug 1 - Exploring ROS With a 2 wheeled Robot - Part 9](https://i.ytimg.com/vi/C1mzAGNZ0K4/mqdefault.jpg)