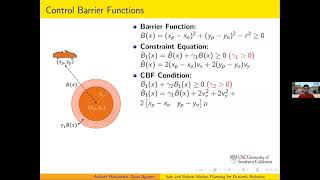
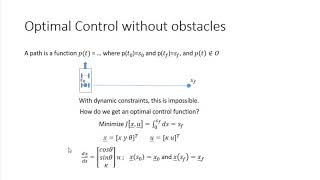
Media Summary: This paper was submitted to and presented at the Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the safety-critical ... Need to get to your goal quickly? Ensure you plan the right
Cdc 2022 Efficient Path Planning - Detailed Analysis & Overview
This paper was submitted to and presented at the Preprint: Abstract: Control Barrier Functions (CBF) are widely used to enforce the safety-critical ... Need to get to your goal quickly? Ensure you plan the right IROS 2020 talk by Julius Rückin about the paper J. Rückin, L. Jin, F. Magistri, C. Stachniss, and M. Popović, “Informative UCLA Computational Robotics 209AS final presentation by Akhil Avula, Aidan Cookson, Calvin Change, and Daniel Truong. The 4th International Conference on Computing and Data Science Title: Logistics Robot
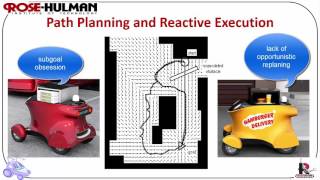
16.412/6.834J Cognitive Robotics - Spring 2019 Professor: Brian Williams MIT. And essentially global planning is just called Project showcase by Minghan Wei of the Robotic Sensor Networks Lab. The RSN Lab is led by Volkan Isler, Professor in the ... Efficient Path Planning for High-DOF Articulated Robots with Adaptive Dimensionality This video will describe features of metric As artificial intelligence and robotics are moving out of highly controlled spaces and into our daily lives, it becomes increasingly ...
Xiaohui Zhou, Ke Xie, Kai Huang, Yilin Liu, Yang Zhou, Minglun Gong, Hui Huang SIGGRAPH Asia 2020. A good route plan starts with knowing what is actually in the field. In this video, we demonstrate how FieldFusion helps users ... This video is our virtual presentation appearing at ICRA 2021 on our MIT 16.412J Cognitive Robotics, Spring 2016 View the complete course: Instructor: MIT students ... ... Xianfeng Gu, and Charlie C.L. Wang, "Energy-