Media Summary: Learning-based Approach for Holonomic Pushing of Box-shaped Grasping in cluttered environments is a fundamental but challenging robotic skill. It requires both reasoning about unseen TCDG: Target-driven Collision-aware Dexterous Grasping for Novel Objects in Clutter
Collision Aware Target Driven Object - Detailed Analysis & Overview
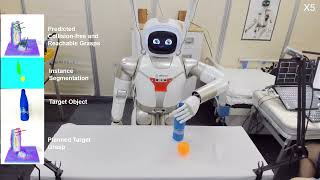
Learning-based Approach for Holonomic Pushing of Box-shaped Grasping in cluttered environments is a fundamental but challenging robotic skill. It requires both reasoning about unseen TCDG: Target-driven Collision-aware Dexterous Grasping for Novel Objects in Clutter Presented in IEEE International Conference on Robotics and Automation, Montreal Canada, May 20-24, 2019. Paper: ... Paper: Work done by Adithyavairavan Murali, Arsalan Mousavian, Clemens Eppner, Chris ... This paper presents a motion planning algorithm that enables robots to efficiently pick up
This video is included as a supplement to our MRS 2017 conference paper of the same name. Authors: Alyssa Pierson and ... Accompanying video of our IROS 2022 Submission. Paper: Code: ... Nowadays robots play an increasingly important role in our daily life. In human-centered environments, robots often encounter ... In this paper, we propose a multi-view deep learning approach to handle robust Slide-grasping for Flat Multi-target Objects in clutter [ ICRA 2026 Accepted Paper ] Robotic pushing is a versatile non-prehensile manipulation skill that enables robots to handle ...
Collision Aware Receding Horizon Path Planning with Terminal Costs This work addresses the challenge of grasping a












![[ICRA 2026] Pushing under Uncertain Object Properties: A Contact-Aware Goal-Oriented Approach](https://i.ytimg.com/vi/jqFI9F3YeOI/mqdefault.jpg)



