Media Summary: ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.8 Authors: Tognon, Marco; Cataldi, Elisabetta; Tello Chávez, ... Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ...
Control Aware Motion Planning For - Detailed Analysis & Overview
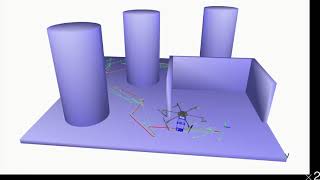
ICRA 2018 Spotlight Video Interactive Session Wed AM Pod G.8 Authors: Tognon, Marco; Cataldi, Elisabetta; Tello Chávez, ... Paper: Tognon M, Cataldi E, Tello Chavez H, Antonelli G, Cortés J, Franchi A. Sarah Keren is a professor in the Technion Faculty of Computer Science and the director of the Collaborative Artificial Intelligence ... Video accompanying an ICRA2018/RAL paper which presents a new method to address the ... Jitske de Vries, Elia Trevisan, Jules van der Toorn, Tuhin Das, Bruno Brito, Javier Alonso-Mora Regulations Southwest Research Institute developed a robotics simulation package using Drake, a simulation tool for robotics. We also ...
Realtime Robotics' powerful combination of advances in computing power and software make it possible for self-driving cars to ... Motion Planning and Inertia Based Control Experiments - Impact Aware Manipulation In IEEE Robotics and Automation Letters (RA-L) and IEEE/RSJ International Conference on Intelligent Robots and Systems ... Robotic mobility in microgravity is necessary to explore asteroids and to aid astronauts in space stations. However, dynamic ... Submitted to ICRA 2024: We present a novel algorithm for See the other videos in this series: This video ...
This video presents the ACC 2020 paper: Impact- Presentation @ IROS 2020. Journal article accepted to IEEE Robotics and Automation Letters (RA-L) and IEEE/RSJ International ... Supplementary video for the IROS 2023 paper "Differentiable Task Assignment and Interaction-Aware Motion Planning for Autonomous Vehicles with Multi-Modal Obstacle Uncertainties B. Brito, A. Agarwal, J. Alonso-Mora, "Learning Interaction In this session, we will discuss various learnable