Media Summary: This paper aims at proposing a comprehensive Video supplement of our ICRA 18 paper. Paper link: This is the video attachment of our paper entitled "OuijaBots: Omnidirectional Robots for
Control Framework For Cooperative Object - Detailed Analysis & Overview
This paper aims at proposing a comprehensive Video supplement of our ICRA 18 paper. Paper link: This is the video attachment of our paper entitled "OuijaBots: Omnidirectional Robots for Paper: Petitti A, Franchi A, Di Paola D, Rizzo A. Decentralized Motion Two WAM arms in the MIT MERS group in CSAIL collaboratively hold a block! The first implementation of dual task space ICRA 2018 Spotlight Video Interactive Session Wed AM Pod S.8 Authors: Lee, Hyeonbeom; Kim, Hyoin; Kim, Woojin; Kim, H. Jin ...
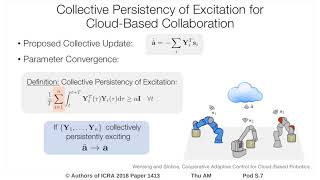
Multi-robot cooperation requires agents to make decisions that are consistent with the shared goal without disregarding ... We examine the problem of moving multiple Accepted to ICRA 2025 Link to paper: Abstract: This paper presents experiments for embedded ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod B.8 Authors: Almeida, Diogo; Karayiannidis, Yiannis Title: ... ICRA 2018 Spotlight Video Interactive Session Thu AM Pod S.7 Authors: Wensing, Patrick; Slotine, Jean-Jacques E. Title: ... This paper presents a novel methodology that allows a swarm of robots to perform a









![[SMC 2020] Hierarchical Needs Based Self-Adaptive Framework For Cooperative Multi-Robot System](https://i.ytimg.com/vi/G2EdBd0plIU/mqdefault.jpg)

![[IROS 2020] Cooperative Control of Mobile Robots with Stackelberg Learning](https://i.ytimg.com/vi/t8lPpKMTFOA/mqdefault.jpg)