Media Summary: Agent in "reacher" environment trained to reach the ball using Lecture 5 of a 6-lecture series on the Foundations of ... in this way to work well with continuous actions is called
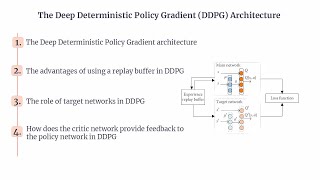
Ddpg Coding Deep Deterministic Policy - Detailed Analysis & Overview
Agent in "reacher" environment trained to reach the ball using Lecture 5 of a 6-lecture series on the Foundations of ... in this way to work well with continuous actions is called Landing of an airplane in X-Plane 11 with Final Report presentation for the TD3 reinforcement learning algorithm in the portfolio selection problem. The Robotic Arm is the PiArm and its objective is to touch the purple object in the simulation. It will be repositioned to its home ...
Welcome to Week 10 Lecture 4 of the course "Special topics in ML (Reinforcement Learning)" by Prof. Balaraman Ravindran.