Media Summary: Decentralized Probabilistic Multi-Robot Collision Supplemental material for ICRA 2018 submission. ICRA 2017 Shayegan Omidshafiei, Shih-Yuan Liu, Michael Everett, Brett Lopez, Christopher Amato, Miao Liu, Jonathan Patrick ...
Decentralized Probabilistic Multi Robot Collision - Detailed Analysis & Overview
Decentralized Probabilistic Multi-Robot Collision Supplemental material for ICRA 2018 submission. ICRA 2017 Shayegan Omidshafiei, Shih-Yuan Liu, Michael Everett, Brett Lopez, Christopher Amato, Miao Liu, Jonathan Patrick ... ... is Hades Shilu today I would like to present uh uh my paper forecastdriven MPC for More information available at: www.ros.org/wiki/multi_robot_collision_avoidance. This video presents results of B-UAVC, a distributed
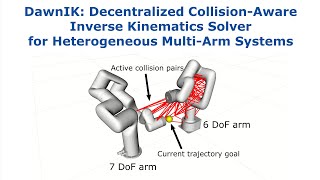
Accepted for presentation at ICRA 2018. Paper: Project: Collision and Deadlock Avoidance in Multi Robot Systems ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.3 Authors: Long, Pinxin; Fan, Tingxiang; Liu, Wenxi; Pan, Jia; ... This video demonstrates the work presented in our paper “DawnIK: The final video showing the simulation of the Full title of the work is "RLSS: Real-time,
A. Serra-Gomez, B. Brito, H. Zhu, J. J. Chung and J. Alonso-Mora, ”Whom to Communicate: Learning Efficient Communication for ...






![[2025] Decentralized Multi-Robot Collision Avoidance With Uncertainty-Aware MPPI](https://i.ytimg.com/vi/_D4zDYJ4KCk/mqdefault.jpg)







![[WIM Robotics] Multi-Robot Collision Avoidance with 3D Vision for Real-time Pick-and-Place](https://i.ytimg.com/vi/NnGIlz7EEPw/mqdefault.jpg)




