Media Summary: Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.3 Authors: Long, Pinxin; Fan, Tingxiang; Liu, Wenxi; Pan, Jia; ...
Deep Learned Collision Avoidance Policy - Detailed Analysis & Overview
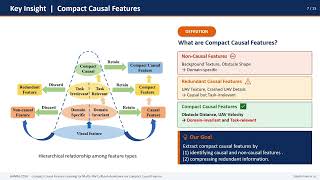
Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Full) Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation (Circle Scene) ICRA 2018 Spotlight Video Interactive Session Thu AM Pod Q.3 Authors: Long, Pinxin; Fan, Tingxiang; Liu, Wenxi; Pan, Jia; ... Learning Robust Policy for Multi UAV Collision Avoidance via Compact Causal Feature(AAMAS 2026) Accepted for presentation at ICRA 2018. Paper: Project: To navigation on the complex environment, the
Road traffic accidents are a leading cause of fatalities worldwide. In the US, human error causes 94% of crashes, resulting in ... This is a supplementary video for MSc thesis by Dongho Kang (supervised by David Hoeller and Dr. Jemin Hwangbo) at ... MY095 - Implementing Optimal Reciprocal Collision Avoidance (ORCA) for robotic navigation A video is used to show our simulation and real robot navigation work. In this AI Research Roundup episode, Alex discusses the paper: '