Media Summary: LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week: Assembly and disassembly tasks often involve multiple sub-tasks coexisting within a single observation frame, making it ... This is the first session with Roger leading a discussion about
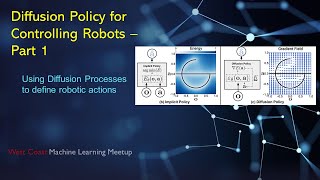
Diffusion Policy Toy Problem - Detailed Analysis & Overview
LeRobot Research Presentation Presented by Cheng Chi in April 2024 This week: Assembly and disassembly tasks often involve multiple sub-tasks coexisting within a single observation frame, making it ... This is the first session with Roger leading a discussion about Diffusion Policy Based Decoupled Whole Body Loco-manipulation in Isaac Lab 2.1.0 Video for paper "Diff-Control: A Stateful In this episode of *Robraintics*, we discuss why
Roger led this the second session of a discussion on Princeton University - Nov 3, 2023 Speaker: Russ Tedrake (MIT) Talk title: Dexterous Manipulation with In this video, I dive into one of the core challenges in robotics and behavioral cloning: multimodality. This DOI: 10.1109/LRA.2024.3363530 Published in: IEEE Robotics and Automation ... Author: Vitalis Vosylius and Edward Johns Institution: The Robot Learning Lab at Imperial College London Published at: ICLR ... Robots hold great promise for performing repetitive or hazardous tasks, but achieving human-like dexterity, especially in ...


![[CVPR 2026] Explicit Recovery Behavior for Diffusion Policies (REACH)](https://i.ytimg.com/vi/KplN4ncy3fU/mqdefault.jpg)