Media Summary: This short video illustrates dynamic area coverage and obstacle avoidance capabilities of 5 α-agents (mobile sensor nodes) ... Welcome to a new Artificial Intelligence series from PHStudios! This series will cover the concepts of Frank McSherry from Materialize ( presents a technical talk about building confidence in
Distributed Anti Flocking Algorithms For - Detailed Analysis & Overview
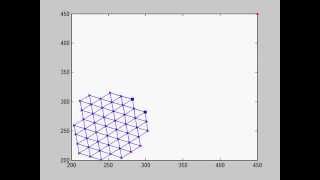
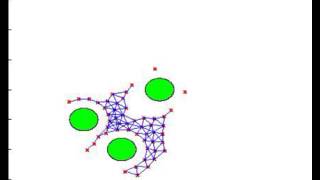
This short video illustrates dynamic area coverage and obstacle avoidance capabilities of 5 α-agents (mobile sensor nodes) ... Welcome to a new Artificial Intelligence series from PHStudios! This series will cover the concepts of Frank McSherry from Materialize ( presents a technical talk about building confidence in Accompanying lecture notes: Full lecture series: ... This is a simulation of a robot swarm using only short-range distance sensors to achieve emergent Identifying friend vs foe, or at least members of your own
A film showing the different solutions to the final assignments for the second programing course for the Creative Technology ... All robots are first programed to go to the rendezvous point based on normal In this video we demonstrate the simulation of Safe Shrink_Size flocking algorithm in Noisy Environment Multi-Agent Dynamic System (Flocking with Obstacles) Fifty thousand simple agents. Three local rules. No global plan, and yet, coherent, lifelike motion emerges. This is the Boids ...
Multi-agent coordination is highly desirable with many uses in a variety of tasks. In nature the phenomenon of coordinated One application of networked dynamics for consensus comes in the form of MIT 6.7960 Deep Learning, Fall 2024 Instructor: Sara Beery View the complete course: ...

![[Flocking AI] 04 - Separation Algorithm](https://i.ytimg.com/vi/RpvjZNhEods/mqdefault.jpg)