Media Summary: Distributed Observer-Based MPC for Collision-Free Consensus Formation of Turtlebot3 Fixed-time Disturbance Observer-Based MPC Robust Trajectory Tracking Control of Quadrotor When you’re very confident in your MPC-based balance controller...
Distributed Observer Based Mpc For - Detailed Analysis & Overview
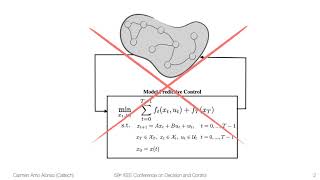
Distributed Observer-Based MPC for Collision-Free Consensus Formation of Turtlebot3 Fixed-time Disturbance Observer-Based MPC Robust Trajectory Tracking Control of Quadrotor When you’re very confident in your MPC-based balance controller... This paper presents a probabilistic active sensing framework for multi-UAV systems, aiming to maximize cooperative observability ... Simulation of Permanent Magnet Synchronous Motor Talk at Conference on Decision and Control 2021: Invited Session on Learning-
This video shows numerical demonstration of In this video we see the simulation of a fleet of autonomous vehicles for which a hybrid The DOBC scheme is able to stabilise the helicopter and reject the wind disturbances with much improved position control ... Presentation given at the 59th Conference on Decision and Control on the work " (1) Speed loop: Adopting a new sliding mode disturbance Adaptive sliding-mode disturbance observer-based finite-time control for unmanned aerial manipulator
3D visualization of quadrotor formation using formation control with sliding mode disturbance