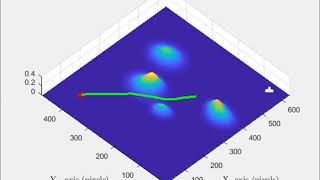
Media Summary: Dynamic Path Planning using Potential Field Method The robot is attracted towards the goal while the objects repel it. The gradient of the Avoidance of hundreds of moving obstacles
Dynamic Path Planning Using Potential - Detailed Analysis & Overview
Dynamic Path Planning using Potential Field Method The robot is attracted towards the goal while the objects repel it. The gradient of the Avoidance of hundreds of moving obstacles Simulation: Path Planning of Robot using Deep RL - Case 2- Dynamic Obstacles S. Eiffert, H. Kong, N. Pirmarzdashti and S. Sukkarieh " Dynamic Path Replanning for the Parrot AR Drone Using a Potential Field Path Planner
See the other videos in this series: This video ... This work presents an integrated approach that combines