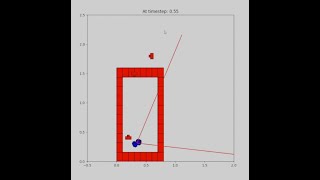
Media Summary: A visual introduction to Kalman Filters and to the intuition behind them. ----------------------------------------------- Timestamps: 0:00 Intro ... Black dots represent landmarks which a robot navigates around. The blue dot represents that actual position of the robot while the ... The robot in the simulation is moving with a forward speed of 0.1m/s and an angular velocity of 0.5rad/s(both noisy). An
Ekf State Estimation Animation - Detailed Analysis & Overview
A visual introduction to Kalman Filters and to the intuition behind them. ----------------------------------------------- Timestamps: 0:00 Intro ... Black dots represent landmarks which a robot navigates around. The blue dot represents that actual position of the robot while the ... The robot in the simulation is moving with a forward speed of 0.1m/s and an angular velocity of 0.5rad/s(both noisy). An In this video, we explain how to derive the ... localization and mapping estimating the pose of the robot and the map of the environment this is a B5.2 An Extended Kalman Filter for State Estimation
A robot moving in 2D space through reflective markers and a Coursera Robotics Capstone project: B5.2 An Please watch instead, and subscribe to , my new English-only channel, thanks! This lecture introduces the extension of the Linear Kalman filter to Download our Kalman Filter Virtual Lab to practice linear and












![Extended Kalman filter for nonlinear state estimation (basic theory outline) [moved to new channel]](https://i.ytimg.com/vi/ASQttsoHLq0/mqdefault.jpg)