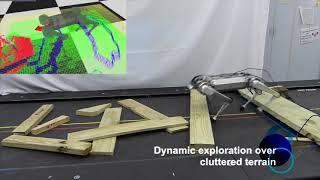
Media Summary: This playlist contains supplementary experiment videos for the paper “Interpretable Variable-Structure Sparse Fuzzy ... Vision-aided Dynamic Exploration of Unstructured Terrain ICRA 2020 The Operobot project is a system which allows the precise control of a group of omnidirectional mobile robots in real time based ...
Evdodgenet Deep Dynamic Obstacle Dodging - Detailed Analysis & Overview
This playlist contains supplementary experiment videos for the paper “Interpretable Variable-Structure Sparse Fuzzy ... Vision-aided Dynamic Exploration of Unstructured Terrain ICRA 2020 The Operobot project is a system which allows the precise control of a group of omnidirectional mobile robots in real time based ... This drone has five sonars that are used to avoid Today's autonomous drones have reaction times of tens of milliseconds, which is not enough for navigating fast in complex ... The AGIBOT X2 humanoid robot is taking robotics to a completely new level with real world movement, intelligent perception, and ...
A quadrotor avoids a ball swinging on a pendulum — a Researchers at the University of Maryland and the University of Zurich equipped a drone with event cameras and a sonar system ... EVReflex: Dense Time-to-Impact Prediction for Event-based
![EVDodgeNet: Deep Dynamic Obstacle Dodging with Event Cameras [ICRA 2020]](https://i.ytimg.com/vi/k1uzsiDI4hM/mqdefault.jpg)