Media Summary: Prerecorded presentation for the conference ICRA2021. Get the full paper here: ... Tutorial - Return of the AI Written by Yotam Granov Cognitive Robotics (097244) - Winter 2022/23 Technion - Israel Institute of ... Manipulation with sampling-based motion planning
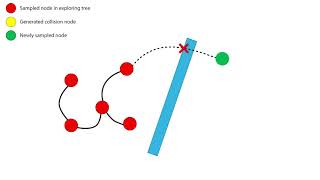
Exploiting Collisions For Sampling Based - Detailed Analysis & Overview
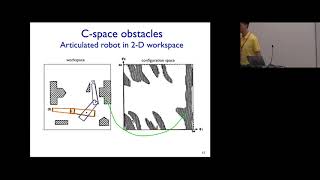
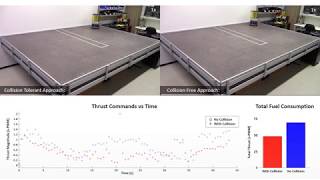
Prerecorded presentation for the conference ICRA2021. Get the full paper here: ... Tutorial - Return of the AI Written by Yotam Granov Cognitive Robotics (097244) - Winter 2022/23 Technion - Israel Institute of ... Manipulation with sampling-based motion planning PlanRob'16 - A Bayesian Effort Bias for Sampling-based Motion Planning Speakers: David Hsu, National University of Singapore. We develop an approach for optimal trajectory planning on a three degree-of-freedom free-flying spacecraft having tolerance to ...
MIT 8.01 Classical Mechanics, Fall 2016 View the complete course: Instructor: Prof. Anna Frebel ... This work contributes a novel strategy towards risk-aware motion planning for Demonstrated on the NASA Valkyrie at University of Edinburgh To appear at Robio 2016. Yiming Yang, Vladimir Ivan, Wolfgang ... In this 2018 GDC talk, Respawn Entertainment's Earl Hammon explains how the Titanfall team made already optimized ... I recently added Separating Axis Theorem to my game engine, which is an approach for working out 2D Navigating safely in dynamic and uncertain environments is challenging due to uncertainties in perception and motion. This letter ...
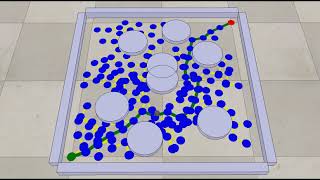
Overview: Supplementary video submission of our paper "Motion Planning for Arduino code & Processing 2 circles are controlled by 2 pressure sensors on the same y-axis and move along the x-axis.
![[Presentation] Exploiting collisions for sampling-based multicopter motion planning](https://i.ytimg.com/vi/gKJkJwO_MWM/mqdefault.jpg)