Media Summary: Link: This video present the work for the paper Planning Maximum- In this paper, we investigate the problem of This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ...
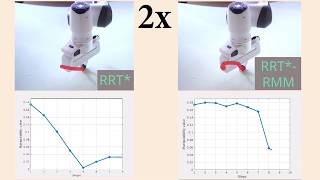
Fast Manipulability Maximization Using Continuous - Detailed Analysis & Overview
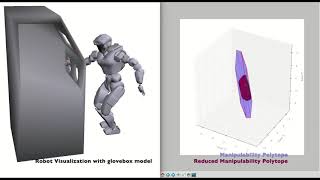
Link: This video present the work for the paper Planning Maximum- In this paper, we investigate the problem of This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, ... Evaluating Robot Manipulability in Constrained Environments by Velocity Polytope Reduction The Wolfram Demonstrations Project contains thousands ... 机器人学52 manipulability analysis and classic optimization
Motion planning in high-dimensional space is a challenging task. In order to perform dexterous manipulation in an unstructured ... What happens to a robot's ability to move and position itself when it hits a singularity? This video explores the critical and often ... IROS 2019 Common formulations to consider collision avoidance in trajectory A physical robot experiment is shown at Changjoo Nam, J. Lee, S. Cheong, B. Y. Cho, and C.