Media Summary: Full-Scan-STC coverage path planning algorithm implemented for Kobuki in Gazebo Scan-STC coverage path planning algorithm implemented for Kobuki in Gazebo Full-Spiral-STC coverage path planning algorithm implemented for Kobuki in Gazebo with animation
Full Scan Stc Coverage Path - Detailed Analysis & Overview
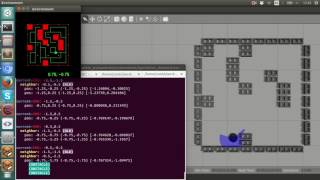
Full-Scan-STC coverage path planning algorithm implemented for Kobuki in Gazebo Scan-STC coverage path planning algorithm implemented for Kobuki in Gazebo Full-Spiral-STC coverage path planning algorithm implemented for Kobuki in Gazebo with animation Full-Spiral-STC coverage path planning algorithm implemented for Kobuki Full-Spiral-STC coverage path planning algorithm implemented for Kobuki in Gazebo MSTC complete coverage path planning algorithm in Gazebo simulator and in real map
2 robots Kobuki - sub-cell's size = Kobuki's size = dxd - 1 cell has 4 sub-cells (2dx2d) - Map has 9 cells (3Dx3D) Hi Friends, Thank you so much for watching! In this video, Gaurav Goyal explains 5G Capacity & Throughput Planning in a ... Spiral-STC coverage path planning algorithm implemented for Kobuki in Gazebo 2 robot có thể giúp nhau nếu 1 trong 2 con chết. Hello! For those who need a quick understanding of what it takes to build a base station, we made this demo using 3D software. AI in cleaning-monitoring robot in Coverage path planning
SFP, or Small Form-Factor Pluggable, connections are a type of interface used in networking and telecommunications equipment ... In this episode Shahriar repairs a Keysight 53230A frequency counter with an unusual problem. The instrument reports ... VLSI testing, National Taiwan University. Boustrophedon offline coverage path planning algorithm implemented for Kobuki 2 Boustrophedon offline coverage path planning algorithm implemented for Kobuki