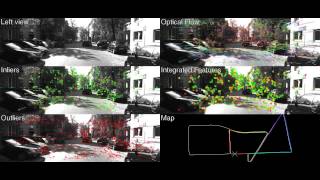
Media Summary: We present an approach of estimating constrained egomotion on a Pixel Processor Array (PPA). These devices embed ... Semantic Video CNNs through Representation Warping ( The video shows the results of the MFI method applied to data set number 13 of the KITTI Benchmarking Suite ...
Iccv 2017 Visual Odometry For - Detailed Analysis & Overview
We present an approach of estimating constrained egomotion on a Pixel Processor Array (PPA). These devices embed ... Semantic Video CNNs through Representation Warping ( The video shows the results of the MFI method applied to data set number 13 of the KITTI Benchmarking Suite ... Publication: Stereo DSO: Large-Scale Direct Sparse 授課教師:電機工程學系王學誠老師機器人視覺Robotic demo for Recurrent Color Constancy ICCV 2017.
The robot is tracking it's position using a We propose a lightweight method for dense online monocular depth estimation capable of reconstructing 3D meshes on ... Ajay Nandoriya, Mohamed Elgharib, Changil Kim, Mohamed Hefeeda, and Wojciech Matusik. RAFSet(Robust Aged Feature Set) 3D-2D motion estimation KITTI.