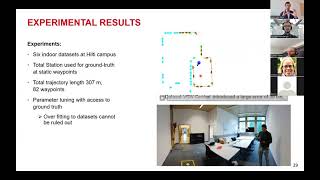
Media Summary: In this Chapter: - Introduction and Iterative Closest Point algorithm - Known Correspondences - Unknown Correspondences - You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... We used a Turtlebot equipped with a RPLidar to map corridors using the iterative closest point algorithm. Source code: ...
Icp Slam 2d - Detailed Analysis & Overview
In this Chapter: - Introduction and Iterative Closest Point algorithm - Known Correspondences - Unknown Correspondences - You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... We used a Turtlebot equipped with a RPLidar to map corridors using the iterative closest point algorithm. Source code: ... Mobile robot mapping system. Sensors input: lidar, IMU, encoder (camera only for visualization) Mobile platform: ITRI MP1 Lidar ... Mobile robot mapping system. Sensors input: lidar, IMU, encoder (camera only for visualization) Mobile platform: Jackal Lidar ... Mapping classroom using VLP16 LiDAR and icp slam algorithm
Ray-SLAM: a 2D Localization Algorithm for Construction Robots











![[ECCV2024] GS-ICP SLAM (Real-time Gaussian Splatting + G-ICP SLAM)](https://i.ytimg.com/vi/e-bHh_uMMxE/mqdefault.jpg)