Media Summary: The recorded version of our conference talk at International Conference on Robotics and Automation ( Simon Zimmermann, Roi Poranne, Stelian Coros.
Icra 2021 Dynamically Feasible Task - Detailed Analysis & Overview
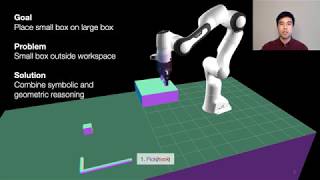
The recorded version of our conference talk at International Conference on Robotics and Automation ( Simon Zimmermann, Roi Poranne, Stelian Coros. Presentation for the IEEE International Conference on Robotics and Automation ( Overview: Supplementary video submission of our paper " Automated Environment Reduction for Debugging Robotic Systems (ICRA 2021)
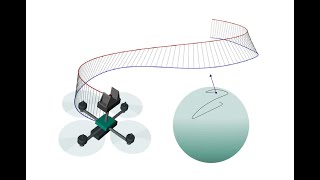
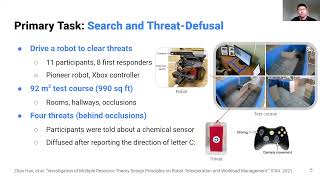
Quantification of Joint Redundancy considering A presentation on "Learning Robot Trajectories subject to Kinematic Joint Constraints" presented at the IEEE International ... For business inquiries: info.prorobots.com ✓ Instagram: ✓ Telegram: ... Abstract: Requiring multiple demonstrations of a



![[ICRA 2021] Distributed Motion Coordination Using Convex Feasible Set Based Model Predictive Control](https://i.ytimg.com/vi/Po792hrkzpY/mqdefault.jpg)





![[ICRA21] Quantification of Joint Redundancy considering Dynamic Feasibility using Deep Learning](https://i.ytimg.com/vi/vQSTmVzwQ_M/mqdefault.jpg)
![[ICRA 2021] Learning Robot Trajectories subject to Kinematic Joint Constraints - Presentation](https://i.ytimg.com/vi/pzXOxE7y7ws/mqdefault.jpg)