Media Summary: Supplementary video for J. Xu, A. Bhardwaj, G. Sun, T. Aykut, N. Alt, M. Karimi, and E. Steinbach, " This video introduces our proposed algorithm, i.e., the automated tuning of nonlinear model predictive controller (NMPC) by ... Accurate and robust object state estimation enables successful object manipulation. Visual sensing is widely used to estimate ...
Iros 2018 Learning Based Modular - Detailed Analysis & Overview
Supplementary video for J. Xu, A. Bhardwaj, G. Sun, T. Aykut, N. Alt, M. Karimi, and E. Steinbach, " This video introduces our proposed algorithm, i.e., the automated tuning of nonlinear model predictive controller (NMPC) by ... Accurate and robust object state estimation enables successful object manipulation. Visual sensing is widely used to estimate ... Paper Title: Tactile Regrasp: Grasp Adjustments via Simulated Tactile Transformations Authors: Francois R. Hogan*, Maria ... Plenary presentation by Dieter Fox, given at utomated tuning of nonlinear model predictive controller by reinforcement
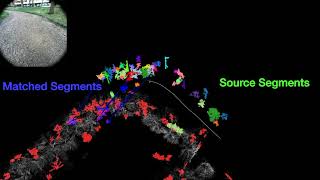
Institutions for Mixed Human-Robot Societies (IROS 2018 accompanying video) Abstract: In this paper we describe a control strategy for a user-adaptive human-robot system for an intelligent robotic Mobility ... RECALL is a new approach for lifelong robot We present a novel approach for interactive auditory object analysis with a humanoid robot. The robot elicits sensory information ... Learning-based modular task-oriented grasp stability assessment ( ICRA 2018, Submitted) Seeing the Wood for the Trees: Reliable Localization in Urban and Natural Environments Georgi Tinchev, Simona Nobili and ...
Launching Socially-Aware Mobile Manipulation Robots in Hospitals Dr. Vivian Chu Diligent Robotics, USA Daniel Feshbach and Cynthia Sung. Prerecorded presentation for Zeyu Ren, Navvab Kashiri, Chengxu Zhou, Nikos G. Tsagarakis. "HERI II: A Robust and Flexible Robotic Hand What are the greates social benefits of robotics? The experts answer us










![[IROS 2018 Spotlight talk] Kinodynamic Comfort Trajectory Planning for Car-like Robots](https://i.ytimg.com/vi/oYgGLUb7vbQ/mqdefault.jpg)