Media Summary: In this project, I focused on manipulating the After the this year Field Robot Event was virtual and used Gazebo ROS to Jackal robot navigating in the human present Gazebo world
Jackal Simulation Waypoint Navigation - Detailed Analysis & Overview
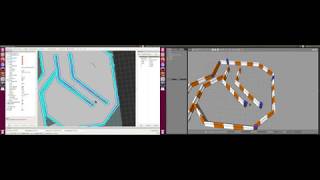
In this project, I focused on manipulating the After the this year Field Robot Event was virtual and used Gazebo ROS to Jackal robot navigating in the human present Gazebo world 3D SLAM and Autonomous Navigation on the Clearpath Jackal UGV (Side View) Small, fast, rugged, and weatherproof this unmanned vehicle was designed the Army Research Lab and includes a built-in Support on ROS Kinetic is a bit sketchy, problems with Odom. Kinetic will be supported fully in the coming months according to ...
Deep TAMER Jackal Simulation Demonstration Data collection Massachusetts Institute of Technology scientists are developing a robot to