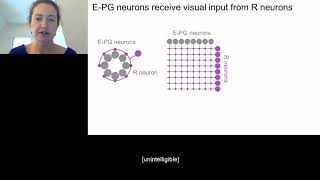
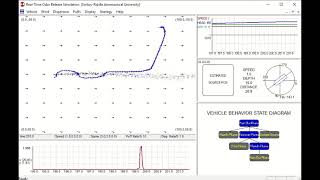
Media Summary: Presented By: Rachel Wilson, PhD Speaker Biography: Rachel Wilson, Ph.D., earned an A.B. in chemistry from Harvard College ... The video is 2 times speed up. The robot finds the odor source at 175 s and declares the odor source at (21.7, 0.1) m. Safe Multi Agent Reinforcement Learning for Behavior Based Cooperative Navigation
Lab 4 Behavior Based Navigation - Detailed Analysis & Overview
Presented By: Rachel Wilson, PhD Speaker Biography: Rachel Wilson, Ph.D., earned an A.B. in chemistry from Harvard College ... The video is 2 times speed up. The robot finds the odor source at 175 s and declares the odor source at (21.7, 0.1) m. Safe Multi Agent Reinforcement Learning for Behavior Based Cooperative Navigation Using simple vector field control as a basic In a recent article ( we presented a complete framework for the safe deployment of humanoid robots in ... Experimental results of the ICINCO 2019 Paper "Combining Ontologies and
I created this video with the YouTube Video Editor ( This video demonstrates the work presented in our paper "Safe Multi-Agent Reinforcement Learning for