Media Summary: RSS Spring 2020 Team 5: Detecting and parking in front of a colored cone. Massachusetts Institute of Technology, Spring 2015 6.141 / 16.405J Robotics: Science and Systems I This video is the internal view of the camera used to
Lab 4 Visual Servoing - Detailed Analysis & Overview
RSS Spring 2020 Team 5: Detecting and parking in front of a colored cone. Massachusetts Institute of Technology, Spring 2015 6.141 / 16.405J Robotics: Science and Systems I This video is the internal view of the camera used to This video explains how to implement robot image-based Computer Vision & Robotics Path planning using camera sensor The purpose of this project is to implement an end to end Bracket grasping demonstration: - using the CAD models of the bracket and of the feeder - the camera pose is estimated thanks to ...
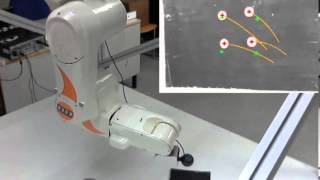
The robot crosses back and forth across the center of it's view in the x direction. It relies on its hood to determine it's position. More and more nonspecialist robot users ask for easy-to-use machines. In In ITRO-14 and ITRO-12, we address the vision-based control problem where the desired pose is specified by means of a ... Implementation of IBVS proposed by Weiss and Sanderson. The control law is based on the error between current and desired ... Researchers at NASA's Langley Research Center have developed an automatic measurement and control method for smart ... PBVS is sometimes referred to as Pose-Based VS and is a model-based technique (with a single camera). This is because the ...
A demonstration of a control method known as Visual Servoing Test - Univ. of Waterloo WAVELab NASA Sample Return Robot Using a novel method of integrating video technology and familiar control devices, a research team from Georgia Tech and the ...