Media Summary: This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... To run precise trajectories, this is probably the easiest way to setup the camera-based (X, Y) To be published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022
Learning Methods For Robust Localization - Detailed Analysis & Overview
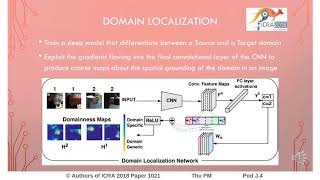
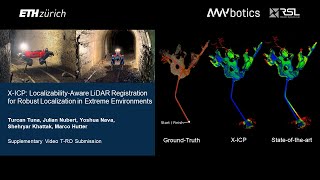
This 3-minutes video is for RSS Pioneer 2020 workshop ( that summarises ... To run precise trajectories, this is probably the easiest way to setup the camera-based (X, Y) To be published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022 Published at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2022. Part of the IROS2022 Best ... ICRA 2018 Spotlight Video Interactive Session Thu PM Pod J.4 Authors: Angeletti, Gabriele; Caputo, Barbara; Tommasi, Tatiana ... Raghavendra Chalapathy: Data61 CSIRO; Khoa Nguyen: Data61-CSIRO; Sanjay Chawla: QCRI.
Paper link: This paper addresses the problem of active collaborative Computer vision - final project Jade Nowlin, Karrar Khudhair, Redouane Laaroussi High level explanation of Submitted to IEEE Transactions on Robotics. X-ICP: Localizability-Aware LiDAR Registration for Jonathan Kelly (University of Toronto) - The difference is night and day: