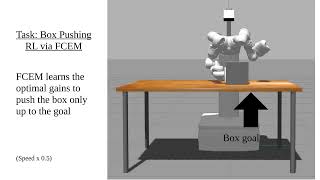
Media Summary: In this video we illustrated the application of a policy learned using model-free reinforcement Learning Variable Impedance Control for Contact Sensitive Tasks MPC based variable impedance learning control
Learning Variable Impedance Control For - Detailed Analysis & Overview
In this video we illustrated the application of a policy learned using model-free reinforcement Learning Variable Impedance Control for Contact Sensitive Tasks MPC based variable impedance learning control Speaker - Antonio Bicchi Abstract - Humans are able to modulate their mechanical Authors: Shreyas Kumar, Ravi Prakash Description Reinforcement Safe and Optimal Variable Impedance Control via Certified Reinforcement Learning
Mr. Changhao Wang University of California, Berkeley Title of The talk: Safe OnGO-VIC: Online Gain Optimization for ROS-based control system for Universal Robots UR5. The proposed control algorithm is based on a Dr. Dongheui Lee Technische Universität München Title of The talk: Demonstration of human-robot co-manipulation with Extended By Kwan Yeong Yoo, Sanggyun Kim, Inha Park and Hyeongyu Yoon. This work aims to develop a framework to support
Maxon Motor Robotic Symposium Presentation -