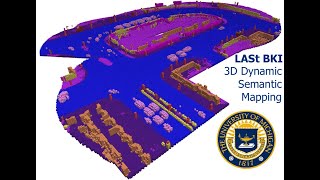
Media Summary: Simple personal implementation of semantic LiDAR mapping. Recurrent-OctoMap: Learning State-Based Map Refinement for Long-Term Our approach is able to perform simultaneous localization and
Lidar Semantic Mapping - Detailed Analysis & Overview
Simple personal implementation of semantic LiDAR mapping. Recurrent-OctoMap: Learning State-Based Map Refinement for Long-Term Our approach is able to perform simultaneous localization and Cornell Univ. 2011 Spring Robot Learning course (CS 4758) final project video. Supplementary video for "Multi-Session, Localization-oriented and Lightweight ICRA 2018 Spotlight Video Interactive Session Tue PM Pod J.7 Authors: Posada, Luis Felipe; Velasquez-Lopez, Alejandro; ...
Workshop Schedule: Speaker : Qing Cheng Abstract : 3D perception is ... Authors: Zhifeng Teng; Jiaming Zhang; Kailun Yang; Kunyu Peng; Hao Shi; Simon Reiß; Ke Cao; Rainer Stiefelhagen Description: ... Paper: Seichter, D., Langer P., Wengefeld, T., Lewandowski, B., Höchemer, D., Gross, H.-M.: "Efficient and Robust Currently, GPS is by far the most popular global localization method. However, it is not always reliable or accurate in all ... Welcome to IJCAI 2021 AI4AD Workshop! Title: Description of our proposed papers "Using High-level Object-based Representation to build








![[3D-DLAD-v4] Vision-based Large-scale 3D Semantic Mapping for Autonomous Driving, Qing Cheng](https://i.ytimg.com/vi/XdXgVaSIPr0/mqdefault.jpg)