Media Summary: Real-time monocular image-based 6-DoF localization (Part 1) Illustration of the slides from Maxime Ferrera PhD thesis defense (link to come). Thanks for AFRL ( Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ...
Localization From Monocular Visual Odometry - Detailed Analysis & Overview
Real-time monocular image-based 6-DoF localization (Part 1) Illustration of the slides from Maxime Ferrera PhD thesis defense (link to come). Thanks for AFRL ( Lecture: Self-Driving Cars (Prof. Andreas Geiger, University of Tübingen) Course Website with Slides, Lecture Notes, Problems ... The video presents our paper at IROS 2021: "Towards Robust In this video we provide an overview of our recent paper: Driven to Distraction: Self-Supervised Distractor Learning for Robust ... Authors: Nan Yang, Lukas von Stumberg, Rui Wang, Daniel Cremers Description: We propose D3VO as a novel framework for ...
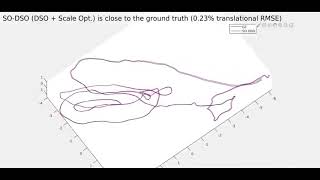
Multiple DSO+ Scale Optimization Demos [Mo et al., IROS 2019]. Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... Our unsupervised deep learning-based method to estimate depth and Using Unsupervised Deep Learning Technique for Monocular Visual Odometry Velocity estimation using a Monocular Visual Odometry algorithm 8-min presentation video for the ECCV paper: "Learning















![[ECCV 2020] (8-min) Learning Monocular Visual Odometry via Self-Supervised Long-Term Modeling](https://i.ytimg.com/vi/ILEorB-Ceg0/mqdefault.jpg)
