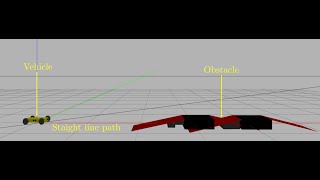
Media Summary: Demonstration of faster object recognition and Simulation Results: "Finite-Time Trajectory Demo performed for the research article entitled: "A Receding Horizon Trajectory
Mobile Robot Tracking Using Computation - Detailed Analysis & Overview
Demonstration of faster object recognition and Simulation Results: "Finite-Time Trajectory Demo performed for the research article entitled: "A Receding Horizon Trajectory Demonstration of the paper "Real-time Moving Object Recognition and Experiments developed by Jesus Quiros (Instituto Politecnico Nacional), Luis T. Aguilar (Instituto Politecnico Nacional), Ulises ... the video showcases the seamless integration of advanced technologies in a modern industrial setting. It highlights a
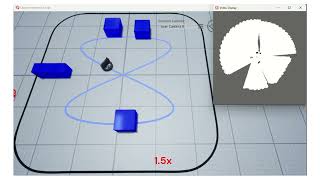
This video is associated to the open access Publicaction: Guerrero-Higueras ÁM, Álvarez-Aparicio C, Calvo Olivera MC, ... A double tier of Model Predictive Control (MPC) is We developed an embedded vision system for Paper available at: arxiv.org/abs/2404.07880 Abstract: Multi- A differential drive, nonholonomic, wheeled Steps: 1. Capture Frame by camera 2. RGB to Gray image 3. Canny Edge
The video describes the optimal algorithm for