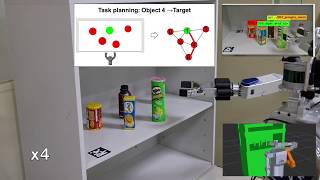
Media Summary: Abstract: Enabling robots to perform multi-stage forceful This video shows a demonstration of a general task and Need to get to your goal quickly? Ensure you plan the right
Motion Planning For Manipulation And - Detailed Analysis & Overview
Abstract: Enabling robots to perform multi-stage forceful This video shows a demonstration of a general task and Need to get to your goal quickly? Ensure you plan the right Reaching Through Latent Space: From Joint Statistics to This video clip shows the physical robot experiment of our two ICRA'20 papers from iTAMP Lab at KIST. (Contact: ... Supplementary Video for ICRA submission "Task Specific Kinodynamic
This is a final project video for the Robotic Manipulation with sampling based motion planning Motion Planning for Object Manipulation by Edge-Rolling (IEEE IROS 2024) Sebastian Castro discusses technical concepts, practical tips, and software examples for Supplementary video for the IROS 2023 paper "Differentiable Task Assignment and Motion Planning and Inertia Based Control Experiments - Impact Aware Manipulation