Media Summary: All right welcome back so today now that we have Muhammad Usman, "Development of an Optimization-Based This is a final project video for the Robotic
Motion Planning For Mobile Manipulators - Detailed Analysis & Overview
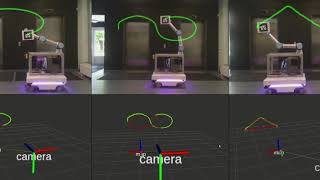
All right welcome back so today now that we have Muhammad Usman, "Development of an Optimization-Based This is a final project video for the Robotic Need to get to your goal quickly? Ensure you plan the right This video shows kinematic simulation of 2-link differentially-driven wheeled Paper Title: Accelerating Bi-Directional Sampling-Based Search for
ICRA 2020 Talk In this project, we focus on the This work addresses the problem of kinematic trajectory