Media Summary: I'm building the closed loop version. Assembling ROS2 version - jazzy Building ros2 h/w interface, pick & place, and mk servo driver from scratch, I'll share my github repo, after ... In this tutorial, I walk you through the fundamentals of the
Moveit Task Constructor With Arctos - Detailed Analysis & Overview
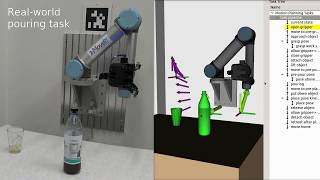
I'm building the closed loop version. Assembling ROS2 version - jazzy Building ros2 h/w interface, pick & place, and mk servo driver from scratch, I'll share my github repo, after ... In this tutorial, I walk you through the fundamentals of the Speaker: Robert Haschke, Bielefeld University Synopsis: We will introduce the Path planning of a 7DOF manipulator in a simplified simulated environment. The The ROS Developers Day ( virtual conference was successfully held on Jun 19, 2021. Starting July ...
In this tutorial, I'll guide you through implementing inverse kinematics (IK) with obstacle clearance cost optimization using the ... In this tutorial, you'll learn how to implement robust fallback strategies in motion planning using the In this tutorial, you'll build a complete Cartesian path planning demo using In this tutorial, I'll show you how to create modular and reusable motion plans for robotic arms using the I show all the code required and explain how it works, and describe the This video demonstrates the implementation of the