Media Summary: This project discusses a real-time implementation of a hierarchical model predictive control ( This is just a simulation of mobile robot with 4 mecanum wheels. In this video, we demonstrate our results for
Mpc Path Following Hard Track - Detailed Analysis & Overview
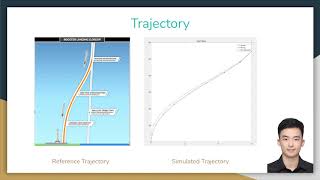
This project discusses a real-time implementation of a hierarchical model predictive control ( This is just a simulation of mobile robot with 4 mecanum wheels. In this video, we demonstrate our results for Nonlinear Model Predictive Control for Real-Time Optimal This video showcases a key part of my PhD research on advanced motion Team Member: Harry Zhang, Junhao Yu, Jiarun Wei We propose a method to generate a (near) optimal rocket landing