Media Summary: This video presents a comprehensive benchmark comparison of multiple Deep Reinforcement Learning algorithms on the ... Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is In this video, I'll show how I used OpenAI Codex to
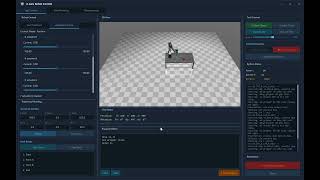
Mujoco 6 Axis Robot Control - Detailed Analysis & Overview
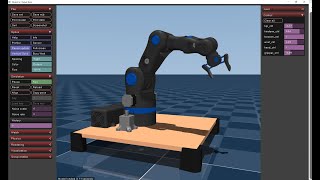
This video presents a comprehensive benchmark comparison of multiple Deep Reinforcement Learning algorithms on the ... Shantanu covers the first of many simulation environments we'll be rolling out this summer. First up is In this video, I'll show how I used OpenAI Codex to Mujoco and Unity Robotic Arm Simulator Project Follow along doc (the notes I took in this video): ... Example of using a reference site for 6D end-effector
This video shows how to use xml tag site to access end-effector position and use sensor tag to access its position and velocity.