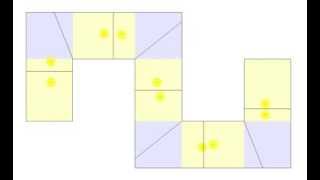
Media Summary: This vidoe is a result for a SITL test applying Multi-Objective Coverage Control of Multi-Agent Systems Handling simultaneous faults in convex environment.
Multi Agent Area Coverage Distributed - Detailed Analysis & Overview
This vidoe is a result for a SITL test applying Multi-Objective Coverage Control of Multi-Agent Systems Handling simultaneous faults in convex environment. A mechanism is proposed to influence the behavior of a group of robots by using This video presents the simulation results of the paper titled " Check out these other resources: - Try MATLAB Example: Train
Abstract: In this presentation, a cooperative mission planner system is designed to accommodate parallel operation, collective ... Then let's look at the plot as the right hand side so in this case the Pham Duy Hung and Trung Dung Ngo www.morelab.org Convex and non-convex structured environments. Distributed Coordination of Multi-Agent Systems Demonstration video showing autonomous vehicles making physical power connections in a simulated disaster field.