Media Summary: RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable This talk aims to invite you to the forefront of MAPF research directly This is a re-recording of my invited talk at EurMAPF-25, ...
Multi Agent Pathfinding - Detailed Analysis & Overview
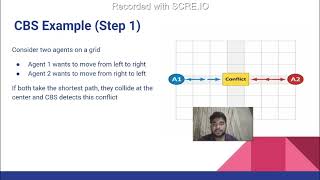
RBE 550: Motion Planning Project Proposal Presentation Team: Dheeraj Bhogisetty, Shiva Surya Lolla and Siyuan Huang ... Short presentation of the paper: Shaull Almagor and Morteza Lahijanian, "Explainable This talk aims to invite you to the forefront of MAPF research directly This is a re-recording of my invited talk at EurMAPF-25, ... Theta* for geometric path planning. ORCA for path following with collision avoidance. Ad-hoc deadlock detection mechanism. Conflict-Based Search (CBS) and Heuristics for Presented at the 2019 Amazon Research Awards Robotics Symposium. In this talk we describe recent progress in the area of ...
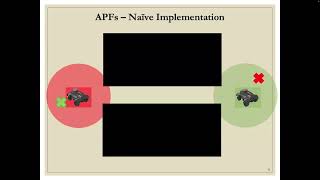
J. Kottinger, S. Almagor, and M. Lahijanian, “Conflict-Based Search for Explainable Artificial Potential Fields for Multi-Agent Pathfinding The video that describes my research about the Real Time A (way too long sorry) presentation on the problem of We propose a novel hybrid algorithm, LNS-SAT, that uses a Boolean Satisfiability (SAT) repair engine within a Large ... This is a poster teaser talk for the paper "A Hierarchical Approach to
Short presentation of the paper: J. Kottinger, S. Shaull Almagor, and M. Lahijanian, “Explainable In this video, we discuss what we mean by Classical MAPF: the core problem studied in Video 21 in a course on single-agent search. This video discusses the You can find more material on the tutorial website: