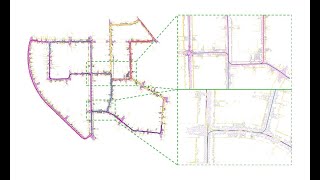
Media Summary: Autonomous vehicles require accurate and robust A presentation for the American Geophysical Union annual fall meeting on the application of robotic Multi-Hypotesis AMCL with 2D Lidar Gridmaps/Octomaps in Simulated Summit XL
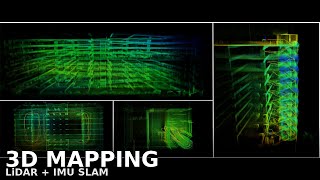
Multi Lidar Localization And Mapping - Detailed Analysis & Overview
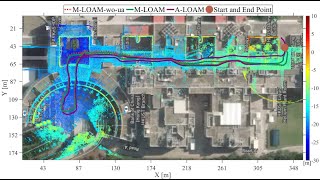
Autonomous vehicles require accurate and robust A presentation for the American Geophysical Union annual fall meeting on the application of robotic Multi-Hypotesis AMCL with 2D Lidar Gridmaps/Octomaps in Simulated Summit XL Presentation slides of the article IROS 2020 Article can be found here: Abstract: This paper ... The attached video for the paper "A decentralized framework for simultaneous calibration, ICRA 2018 Spotlight Video Interactive Session Wed PM Pod M.1 Authors: Wan, Guowei; Yang, Xiaolong; Cai, Renlan; Li, Hao; ...
Main Street Autonomy can simplify the challenges your robotics team is facing. MSA's Calibration Anywhere software generated ... M. Palieri, B. Morrell, A Thakur, K. Ebadi, J. Nash, A. Chatterjee, C. Kanellakis, L. Carlone, C. Guaragnella, A. Agha-mohammadi ... This video is about paper "Lightweight 3-D In this video we show, how our car localizes itself in the surrounding using MultiLiDAR =================================== Abstract: Combining ...