Media Summary: Need to get to your goal quickly? Ensure you Paper published at 2020 IEEE/RSJ International Conference on Intelligent An Effective Framework for Near-Optimal Multi-Robot Path Planning
Multi Robot Path Planning Using - Detailed Analysis & Overview
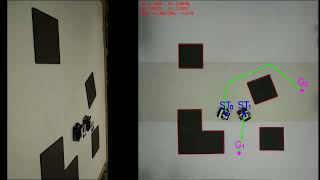
Need to get to your goal quickly? Ensure you Paper published at 2020 IEEE/RSJ International Conference on Intelligent An Effective Framework for Near-Optimal Multi-Robot Path Planning Get instant access to MATLAB & Simulink books, guides, and course files to boost your skills! Get Access Now: ... Code is available at: In this paper we describe an In this demo, goals for vehicles are randomly created. Our optimal
The video accompanies our ICRA 2019 paper. Combining Safe Intervals and RRT* for Efficient Teng Guo, Jingjin Yu Paper: Parking lots and autonomous warehouses for accommodating many ...
![Multi-Robot Planning [Lecture, Marija Popović]](https://i.ytimg.com/vi/Wcvw8qyUan8/mqdefault.jpg)


![[IROS 2020] Graph Neural Networks for Decentralized Multi-Robot Path Planning](https://i.ytimg.com/vi/Ph9vjMNe6go/mqdefault.jpg)