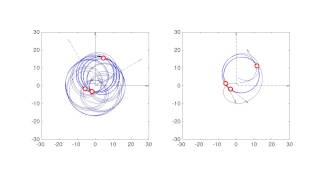
Media Summary: VisionNav® Robotics is a global leader in autonomous industrial This paper presents an optimization-based Multi-vehicle Control to Trifolium Formation
Multi Vehicle Control To Coordinated - Detailed Analysis & Overview
VisionNav® Robotics is a global leader in autonomous industrial This paper presents an optimization-based Multi-vehicle Control to Trifolium Formation Welcome to IJCAI 2021 AI4AD Workshop! Title: Three robots cooperatively generate a 3D occupancy grid map of The George Washington University's School of Engineering and ... This video shows the simulation results of the paper "Distributed Model Predictive Intersection
experiment for multi-vehicle formation under vision constraint





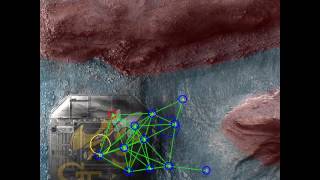









![Simulated Coordination of Autonomous Mine Vehicles [Autonomous Mining]](https://i.ytimg.com/vi/zK8pLjOrXkc/mqdefault.jpg)

