Media Summary: Navigation and control of KUKA youBot to detect A 2 wheeled robot is equipped with a 2D laser range finder in order to detect Obstacle Avoidance using 2D Lidar and Bug 2 Algorithm
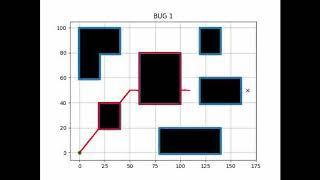
Obstacle Avoidance With Bug2 Algorithm - Detailed Analysis & Overview
Navigation and control of KUKA youBot to detect A 2 wheeled robot is equipped with a 2D laser range finder in order to detect Obstacle Avoidance using 2D Lidar and Bug 2 Algorithm It is an implementation on the lego mindstorms EV3 system of the Lecture 1.4. Wherein we introduce and explore the operation of the Reinforcement Learning for obstacle avoidance + mapping algorithm DEMO.
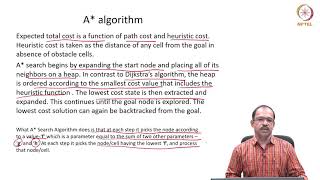
See the other videos in this series: This video ... How do GPS navigators find the quickest path through a massive network of roads in milliseconds? Or how do AI characters in ...