Media Summary: An efficient closed-loop locomotion control system for biped Video material for the computer science honours project by David Blore: Evolving We present an extended mathematical model of the
Ode Central Pattern Generator Robot - Detailed Analysis & Overview
An efficient closed-loop locomotion control system for biped Video material for the computer science honours project by David Blore: Evolving We present an extended mathematical model of the Zhang et al. "CPG Modulates the Omnidirectional Motion of a Hexapod FPGA Implementation of Central Pattern Generator for legged robots locomotion After watching this video you should be able to: 1) Describe the characteristics of a
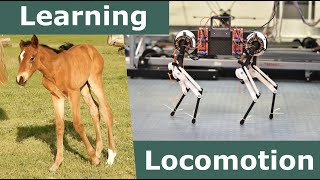
Patellar reflex, CPGs, stomatogastric ganglion, hierarchy of networks involved in running, headless chickens, pacer horses, ... In this video, we investigate the application of an integrated programmable This is a mini tutorial video showing the basic CPG module for locomotion in the spinal cord and how it is influenced by different ... Ruppert, F., & Badri-Spröwitz, A. (2022). Learning Plastic Matching of