Media Summary: This video was developed during the “oosCaR – 2D Animated Cartoons for Want to learn industrial automation? Go here: ▷ Want to train your team in industrial automation? Go here: ... [IEEE CSS Video Clip Contest 2015 Submission] This is a video introduction to controlling self-driving cars, specifically using ...
Ooscar Project Pid Control - Detailed Analysis & Overview
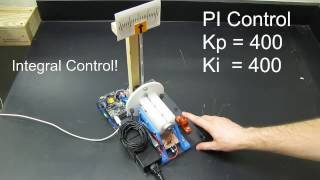
This video was developed during the “oosCaR – 2D Animated Cartoons for Want to learn industrial automation? Go here: ▷ Want to train your team in industrial automation? Go here: ... [IEEE CSS Video Clip Contest 2015 Submission] This is a video introduction to controlling self-driving cars, specifically using ... Balancer - plate balancing a ball with PID controller, resistive panel and servos, arduino You guys can help me out over at Patreon, and that will help me keep my gear updated, and help me keep this quality content ... The demonstration in this video will show you the effect of proportional, derivative, and integral
Presentation detailing the development of the UAV. Focus on the For clarification, the equation for zeta based on percent overshoot written at about 1:12 is zeta=sqrt( ln^2(%OS/100) ... This tutorial demonstrates how to manually tune a